What Is a Servo Motor? Engineer’s Practical Guide
A servo motor is defined as a rotary or linear actuator integrated with a feedback sensor and controller to deliver precise control of position, velocity, and acceleration in a closed-loop system. Unlike a standard induction motor that simply spins when powered, a servo motor continuously measures its own output and corrects itself in real time. The three core components are the motor itself, a feedback device such as an encoder or resolver, and a compatible servo drive or controller. Manufacturers like KOCO MOTION and system integrators referencing HELUKABEL standards build entire motion control architectures around this three-part relationship.
How does a servo motor work?
The operating principle of a servo motor is the closed-loop servomechanism. The controller sends a setpoint command, the motor moves, and a feedback sensor reports the actual position or speed back to the controller. The controller calculates the difference between the commanded state and the measured state. That difference is called the error signal. The controller then adjusts its output to drive the error toward zero.
Servo controllers continually compare commanded state to measured feedback and adjust motor output accordingly. This continuous correction is what separates servo systems from open-loop motor control, where no feedback exists and positional drift goes undetected.
The feedback device is the backbone of this process. Two encoder types dominate industrial practice:
- Incremental encoders count pulses from a reference point on startup. They are cost-effective and widely used in CNC machinery and conveyor systems.
- Absolute encoders report exact position at power-on without homing. They are preferred in robotics and safety-critical applications where losing position on power loss is unacceptable.
The controller processes feedback using a PID (Proportional-Integral-Derivative) algorithm. The proportional term responds to current error, the integral term corrects accumulated error over time, and the derivative term dampens rapid changes to prevent overshoot. Understanding how servo drives receive position feedback is critical before tuning any of these gains.
Pro Tip: The most common field misconception is that a servo motor is just a motor. It is not. A servo motor without its encoder and controller is simply an actuator. The precision comes from the complete system, not the motor alone.
What types of servo motors are available?
Servomotors are chosen as part of a system combining motor, feedback sensor, and drive. The motor type you select determines the system’s torque density, maintenance requirements, and suitability for the environment.
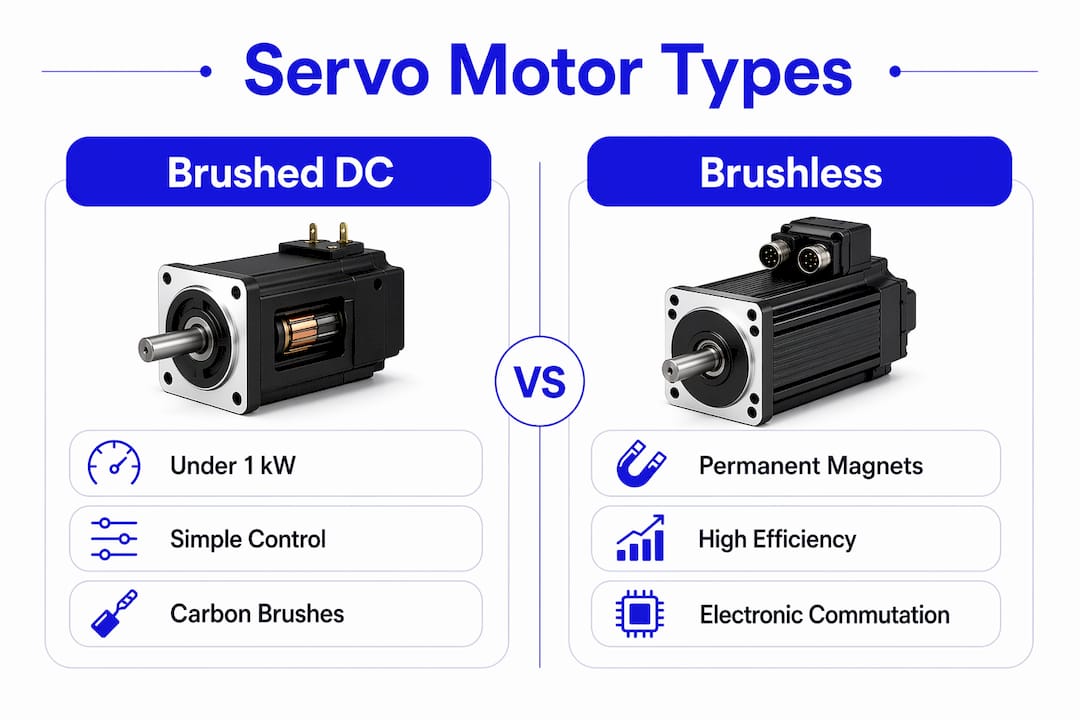
Brushed DC servo motors
Brushed DC servo motors use carbon brushes to transfer current to the rotor. They are straightforward to control and carry lower upfront cost. The tradeoff is brush wear, which requires periodic maintenance and limits them to lower-duty or lower-speed applications.
Brushless AC and DC servo motors
Brushless servo motors use permanent magnets on the rotor and electronically commutated stator windings. They deliver higher torque density, longer service life, and better thermal performance than brushed designs. Most modern electric servo motors in industrial automation are brushless AC types, driven by a dedicated servo amplifier.
Integrated servo motors
Integrated servo motors with built-in encoders and drives provide compact, efficient solutions for motion control with reduced wiring and system cost. The KOCO MOTION iSV2-RS series is a practical example: it integrates a 17-bit encoder and servo drive in an 80 mm frame with power ratings up to 750W and communication via Modbus RTU. For machine builders trying to reduce panel space and wiring complexity, integrated units cut installation time significantly.
Large industrial servo motors
Large servo motors serve heavy automation tasks such as press lines, large robotic arms, and paper or steel mill equipment. These units operate at higher voltage levels and require careful thermal management and robust mounting. They are specified by frame size, insulation class, and IP rating rather than just wattage.
| Type | Power Range | Typical Use | Key Advantage |
|---|---|---|---|
| Brushed DC | Under 1 kW | Light positioning, lab equipment | Low cost, simple control |
| Brushless AC | 100W–15 kW | CNC, robotics, conveyors | High torque density, long life |
| Integrated (iSV2) | Up to 750W | Compact machines, packaging | Reduced wiring, smaller footprint |
| Large Industrial | 5 kW and above | Press lines, heavy robotics | High torque, heavy-load stability |
Selecting the right type requires matching power, torque, speed range, and feedback interface to the load and controller already in the system.
What are the common applications of servo motors?
Servo motors provide stable torque, fast responses, and precise positioning that make them the default choice across a wide range of industrial automation tasks. Their ability to hold position under varying load is what sets them apart from stepper motors or variable frequency drive systems in demanding applications.
Common industrial applications include:
- CNC machining centers: Servo motors drive the X, Y, and Z axes with sub-millimeter repeatability. CNC automation in aerospace manufacturing relies on servo-driven axes to hold tight tolerances on complex parts.
- Robotic arms: Six-axis industrial robots use a servo motor at each joint. The controller coordinates all six axes simultaneously to execute programmed paths with high repeatability.
- Automated conveyor and pick-and-place systems: Servo motors index products to exact positions for vision inspection, labeling, or assembly.
- Radar and antenna tracking systems: Servo motors rotate antenna arrays to follow targets, requiring continuous position correction at low speeds.
- Automated doors and actuators: High-cycle industrial doors use servo systems to control acceleration and deceleration profiles, reducing mechanical stress.
Servo motors deliver precise angular or linear positioning with repeatability that stems from high-resolution encoders and sophisticated control algorithms. That repeatability is why automated machining processes built around servo systems consistently outperform manually adjusted or open-loop alternatives in throughput and part quality.
What key specifications must engineers understand?
Specifying a servo motor correctly requires understanding a set of interdependent parameters. Getting one wrong can cause poor performance, thermal failure, or control instability.
Power and Torque
Rated power (watts or kilowatts) sets the continuous output capacity. Torque is specified at a given speed, typically in Newton-meters (Nm). The KOCO MOTION iSV2-RS8075V48G, for example, delivers 2.39 Nm torque at 3,000 RPM at 750W rated power. Always verify the torque-speed curve, not just the peak torque rating.
Encoder Resolution
Encoder resolution is measured in bits for absolute encoders or counts per revolution (CPR) for incremental types. A 17-bit encoder provides 131,072 positions per revolution. Higher resolution improves positioning accuracy but also increases the data rate demands on the controller and drive.
Communication Protocols
Modern servo drives communicate via protocols such as Modbus RTU, EtherCAT, PROFINET, or pulse/direction signals. Confirm the protocol before specifying a drive. Mismatched protocols require additional hardware or firmware that adds cost and latency.
Frame Size, Insulation Class, and IP Rating
Frame size determines mounting compatibility with existing machine structures. Insulation class (B, F, or H) defines the maximum winding temperature the motor tolerates. IP rating (e.g., IP65 or IP67) specifies protection against dust and water, which matters in food processing, washdown, or outdoor environments.
Controller Compatibility
Compatibility in feedback interface and controller drive signals is more critical than physical motor specs alone when retrofitting or replacing a servo. A motor with the right frame and torque but the wrong encoder interface will not function without a signal converter or drive replacement.
Pro Tip: Before commissioning a new servo system, verify that the load inertia ratio (load inertia divided by motor inertia) falls within the drive manufacturer’s recommended range. A ratio above 10:1 almost always produces overshoot and oscillation regardless of how well you tune the PID gains.
The role of the encoder in a servo system cannot be overstated. A poorly matched or damaged encoder produces feedback errors that no amount of controller tuning can fix.
Key takeaways
A servo motor’s precision is a product of the complete system: motor, encoder, and controller working as one closed-loop mechanism.
| Point | Details |
|---|---|
| System thinking required | Precision comes from motor, encoder, and controller together, not the motor alone. |
| Encoder type matters | Absolute encoders retain position on power loss; incremental encoders require homing on startup. |
| Specs are interdependent | Torque, encoder resolution, and protocol must all match the drive and load before specifying. |
| Inertia ratio is critical | Keep load-to-motor inertia ratio within the drive’s recommended range to prevent oscillation. |
| Application drives selection | CNC, robotics, and heavy industrial tasks each require different motor types and frame sizes. |
Why i think engineers underestimate the controller half of the equation
After years of working with industrial automation systems, the pattern I see most often is this: an engineer specifies an excellent motor, pairs it with a quality encoder, and then treats the controller tuning as an afterthought. The result is a system that technically has all the right hardware but behaves poorly in production.
Loop tuning requires matching feedback resolution and load inertia to prevent overshoot and oscillation even when the motor hardware is optimal. That sentence sounds straightforward. In practice, it means spending real time on the commissioning floor with a scope or drive diagnostic tool, watching the step response, and adjusting gains methodically. Most integration problems I have seen trace back to skipped or rushed tuning, not hardware failure.
The other underestimated factor is feedback signal integrity. A shielded encoder cable routed too close to a high-current power cable will inject noise into the feedback signal. The controller interprets that noise as position error and corrects for it, creating vibration or hunting at standstill. The fix is a wiring change, not a parameter change. Testing a servo motor before installation, including checking encoder signal quality, saves hours of troubleshooting later. I always recommend reviewing a structured pre-install test process before putting any servo into service, new or refurbished.
The trend I find genuinely interesting right now is the move toward integrated servo motors. Units like the KOCO MOTION iSV2 series collapse the drive, encoder, and motor into one housing. For machine builders, this reduces the number of failure points and simplifies commissioning. For maintenance teams, it means one part number instead of three. That shift is changing how engineers think about motion control architecture at the system level.
— Monica
Source your servo motors and compatible controls at Industrialpartsusa
Industrialpartsusa stocks servo motors, compatible drives, motion controllers, and the industrial automation components that connect them. Whether you need a replacement unit for a legacy production line or components to support a new build, Industrialpartsusa carries new, surplus, and remanufactured inventory with same-day shipping on in-stock items.
Every unit ships with a one-year warranty backed by in-house testing and repair capabilities. For engineers sourcing hard-to-find parts or evaluating production line automation components, Industrialpartsusa provides the technical depth and inventory breadth to keep your systems running. Contact the team directly or browse the catalog to find the servo motor or controller your application requires.
FAQ
What is a servo motor in simple terms?
A servo motor is a motor combined with a feedback sensor and controller that continuously corrects its own position or speed. The result is precise, repeatable motion that a standard motor cannot achieve on its own.
How does a servo motor differ from a stepper motor?
A servo motor uses closed-loop feedback to confirm and correct position, while a stepper motor operates open-loop and assumes each commanded step was executed. Servo systems handle higher speeds and varying loads more reliably than steppers.
What are the best servo motors for industrial automation?
The best servo motor for a given application depends on torque, speed, encoder resolution, and protocol requirements. Brushless AC servo motors from manufacturers like KOCO MOTION, Mitsubishi, and Omron are widely used in CNC and robotic applications for their torque density and reliability.
What specifications matter most when selecting a servo motor?
Torque at rated speed, encoder resolution, communication protocol, IP rating, and load inertia ratio are the five specifications that most directly affect system performance and stability.
Can i replace a servo motor without changing the drive?
Replacing a servo motor without changing the drive is possible only if the replacement motor uses an identical or fully compatible feedback interface and signal protocol. Feedback interface compatibility is more critical than matching physical frame size alone.